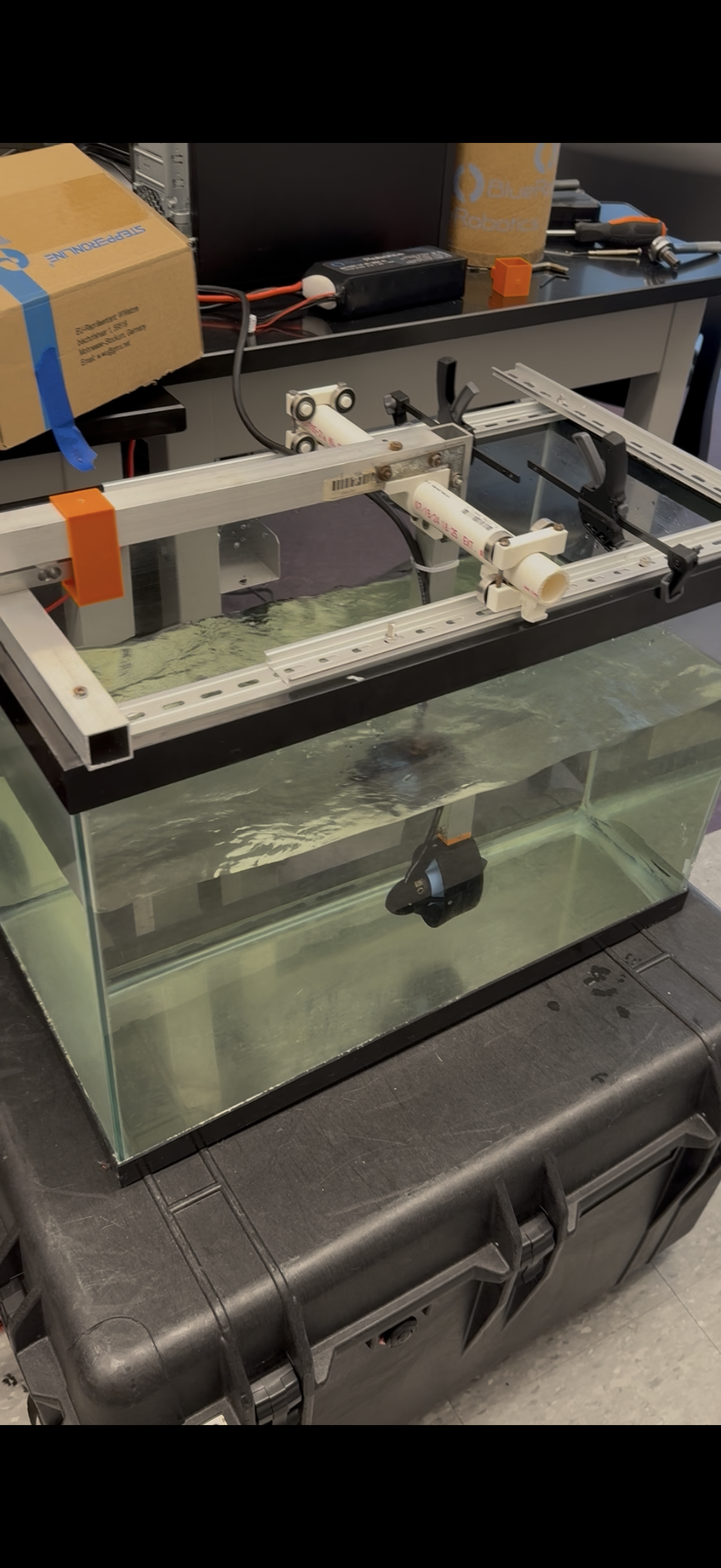
Underwater Thruster Test Stand
Currently developing a comprehensive test apparatus to measure thrust output of underwater motors. Built from lab materials and 3D printed components, this system features real-time force measurement, web-based control interface, and automated data acquisition for ROV/AUV design optimization.
Python
Raspberry Pi
3D Printing
Load Sensors
Web Interface
ESC Control
Active Development