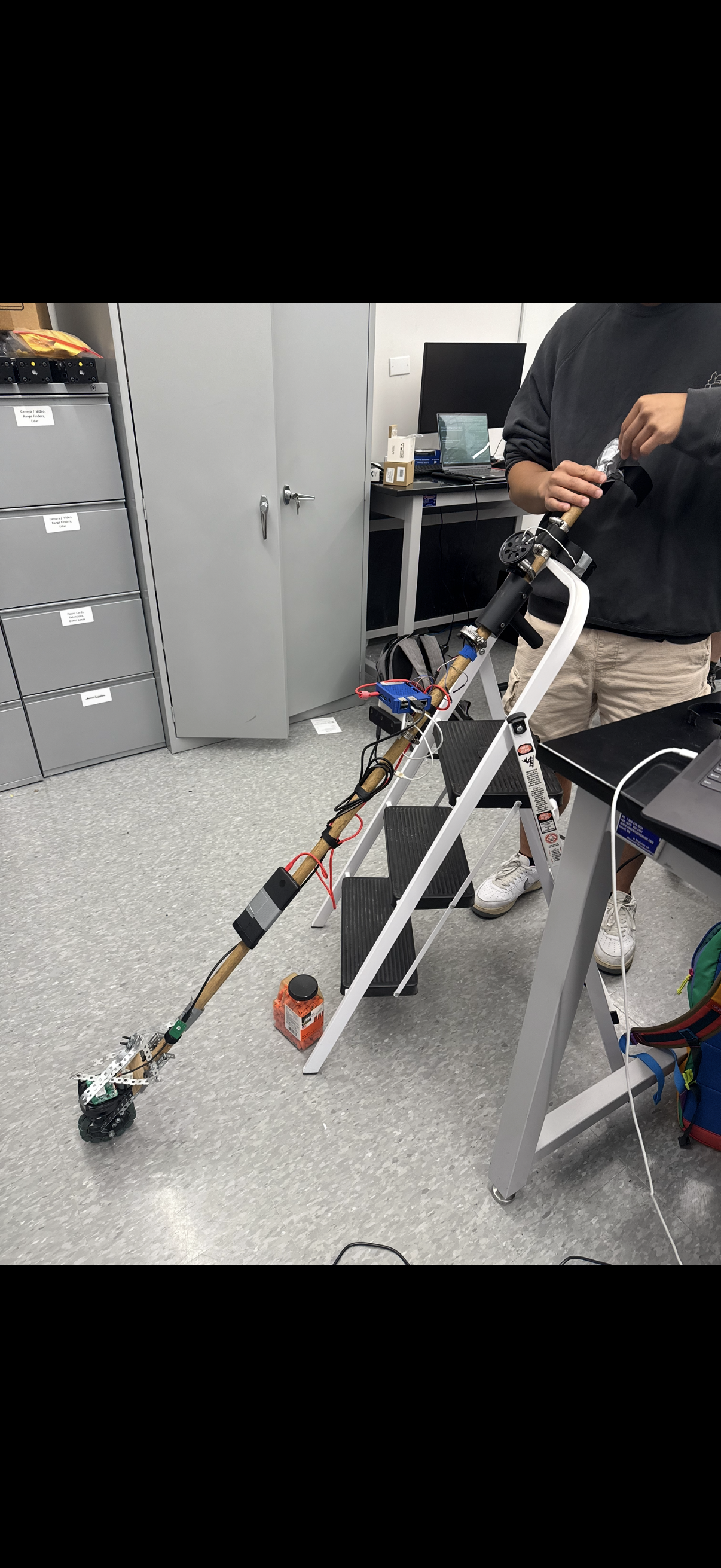
Smart Cane for Visually Impaired
An innovative assistive technology prototype developed for LSU's Assistive Robotics Course. This smart cane combines LiDAR obstacle detection with AI-powered car recognition to provide comprehensive navigation assistance for visually impaired users through haptic feedback.
LiDAR
YOLO Neural Networks
Raspberry Pi
Python
ROS 2
OAK-D Lite
Haptic Feedback